While robots taking a tumble is pretty funny,watching how these humanoid machines figure outhow to walk autonomously without falling isabsolutely fascinating.
虽然机器人摔倒很有趣,但观看这些人形机器人是如何学会自己行走还不摔倒的还是让人很感兴趣的。
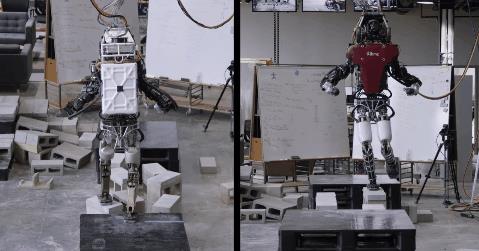
In a new video, the Florida Institute for Human andMachine Cognition (IHMC) showcased an automaticfootstep planning system for Boston Dynamics' Atlasand NASA's Valkyrie robots.
在一段新发布的视频中,佛罗里达人类与机器认知研究所(IHMC)展示了为波士顿动力公司的Atlas机器人和NASA的Valkyrie机器人设计的一个自动足迹规划系统。
The method uses the machines' sensors to work out the most efficient path to a human-selected location. It also works on rough and narrow terrains.
这种方法是利用机器的传感器找到最优路线到达人为选择的地点,在凹凸路面和狭窄通道上也能行走。
Previously, the IHMC relied on a manual method that required a human operator to place thedesired footsteps in a special user interface.
此前佛罗里达人类与机器认知研究所依靠手动方法,需要操作人员把预定脚步放进特殊的用户界面。
Unfortunately, this method was rather slow and cumbersome, which is why the IHMC has beenworking on a new autonomous approach that completely removes the need for a humanoperator.
不幸的是这种方法很慢,还很麻烦,所以佛罗里达人类与机器认知研究所一直在研究新的自动处理方法,完全替代操作人员。
Indeed, the IHMC notes that the human-operated approach was one of the reasons why theAtlas robot it programmed fell during The Defense Advanced Research Projects Agency's(DARPA) Robotics Challenge in 2015.
其实佛罗里达人类与机器认知研究所说人类操作是导致了他们编程的Atlas在参加2015年美国国防高级研究计划局的机器人挑战赛中摔倒的原因之一。
To circumvent human error, the new system lets an operator select the desired location, butultimately relies on an algorithm to figure out how to get the robot there and avoidobstacles.
为了避免人类的失误,这个新系统让操作员选择预定位置,但最终依靠的是一种算法想办法让机器人到达指定地点并避开障碍物。
While the new method works almost flawlessly in flat environments, it still has lots of progressto made when it comes to narrow and rough terrains. "Currently, narrow terrain has a successrate of about 50 percent, rough terrain is about 90 percent, whereas flat ground is near 100percent," the IHMC notes.
虽然这种新方法在平地上走没问题了,但走狭窄通道和凹凸地面仍有待改进。佛罗里达人类与机器认知研究所说:“目前狭窄通道行走成功率约为50%,凹凸地面约为90%,而平地接近100%。”
|
|
 /1
/1 
